VNect:使用单张RGB图像进行实时3D人体姿态估计.
在人体姿态估计任务中,如果将3D姿态视为2D姿态的隐变量,则会产生空间的歧义性问题。因为2D位置稀疏序列失去了空间的前后性,如四肢的前后方向(手往前和往后在2D序列中表现的位置是一样的),这样在模糊前提下的估计会导致错误的估计。
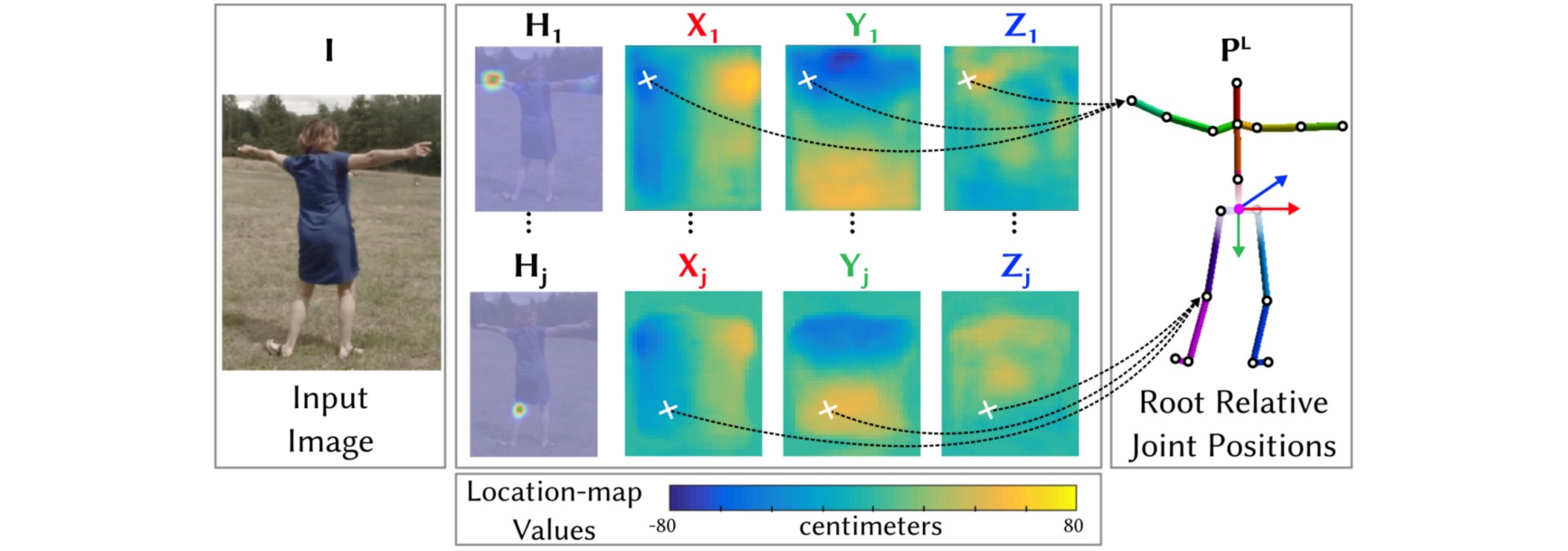
为了解决这种问题,作者提出从图像特征中直接学习3D姿态隐特征的判别方法VNect。通过全卷积网络在图像中联合训练2D和3D姿态。网络预测一个热图(heatmap)及位置图(location map)。位置图存储关节点相对于根关节的三维坐标,实际上就是$X, Y, Z$三个方向的坐标图。找到关键点的过程为从热图中寻找关节的最大值$(x, y)$,则在对应的$X, Y, Z$位置图中找到对应位置的点,组成相对根节点的3D坐标。
VNect的输入是连续的单目RGB图像(实际上每次输入是一张RGB图像),第t帧的输出为全局3D骨骼位置$P^G_t$。CNN联合训练2D关节点位置$K_t$和相对根关节的3D关节点位置$P_t^L$。最后将2D和3D关节点预测位置结合起来,估计出一个平滑的、时间连续的姿态$P^G_t(\theta, d)$,其中$d$是相机空间的全局位置,$\theta$是运动学骨架的关节点角度。$J$表示关节点的数量。由于这种3D姿态估计是通过单帧进行的,无法考虑前后信息,无法在视频时间上保持动作的一致性,所以需要一系列的后处理。

⚪ VNect结构

VNect设计的卷积网络模型如上图所示。骨干网络为ResNet50,从res5a层开始修改结构,最终目标是预测2D热图$H$和3个位置图$X, Y, Z$。通过使用额外的3个位置图将2D热图扩展成3D,方式为找到关节点$j$对应热图的最大值位置,依据最大值位置在$X, Y, Z$中找到对应的$x_j, y_j, z_j$存为\(P^L=\{x, y, z\}\),其中$x\in R^{1*J}$。训练损失如下,其中$\odot$表示Hadamard乘积,实际操作为元素对应乘积:
\[Loss(x_j)=\| H^{GT}_j \odot (X_j - X_j^{GT}) \|\]除输入和输出外,VNect的中间还加入了和相对于根关节的位置图$X_j, Y_j, Z_j$相似的运动学父相对位置图(kinematic parent-relative location-map) $\Delta X_j, \Delta Y_j, \Delta Z_j$,然后用于计算骨骼长度图(bone length-map):
\[BL_j=\sqrt {\Delta X_j \odot \Delta X_j + \Delta Y_j \odot \Delta Y_j + \Delta Z_j \odot \Delta Z_j}\]作者想通过结合中间预测和中间特征,给网络额外增加骨骼长度的明确概念,以自适应特征对象躯干。
在训练的时候加入中间监督。随着迭代的加深,逐步减少中间损失的权重。中间监督从 res4d 和 res5a 预测 2D heatmaps 和 3D location maps。2D pose使用MPII和LSP进行预训练,3D pose使用MPI-INF-3DHP和Human3.6m。huamn3.6数据集除了S9和S11都用于训练,MPI-INF-3DHP使用全部。
⚪ 后处理
在视频中,逐帧姿态估计不能充分利用运动的时间一致性,小的姿态误差会导致时间上的抖动,所以在后处理时做时域滤波和平滑。
平滑时同时利用2D姿态和3D姿态,最后得到的骨骼关节角度$\theta$和根关节点在相机空间的坐标$d$由最小化下面公式的能量所得
\[\begin{aligned} E_{total}(\theta,d) =& E_{IK}(\theta,d) + E_{proj}(\theta,d) \\ &+ E_{smooth}(\theta,d) + E_{depth}(\theta,d) \end{aligned}\]$E_{IK}$是3D逆运动像,与3D CNN的输出$P_t^L$的相关性来决定整体的姿态;$E_{proj}$决定全局姿态$d$,通过2D检测结果来校正3D pose;$E_{smooth}$衡量时间稳定度;为抵消单目重建中的不确定性,对深度的大变化进行补偿$E_{depth}$。
\[\begin{aligned} E_{IK}(\theta,d) &= ||(P_t^G-d)-P^L_t||_2 \\ E_{proj}(\theta,d) &= ||\Pi(P_t^G)-K_t||_2 \\ E_{smooth}(\theta,d) &= ||\hat{P_t^G}||_2 \\ E_{depth}(\theta,d) &= ||[\tilde{P_t^G}]_Z||_2 \\ \end{aligned}\]

