DeepLab v3: 重新评估图像语义分割中的扩张卷积.
从Deeplab v3开始,Deeplab系列舍弃了CRF后处理模块,提出了更加通用的、适用任何网络的分割框架。DeepLabV3的作者做了两部分的工作:
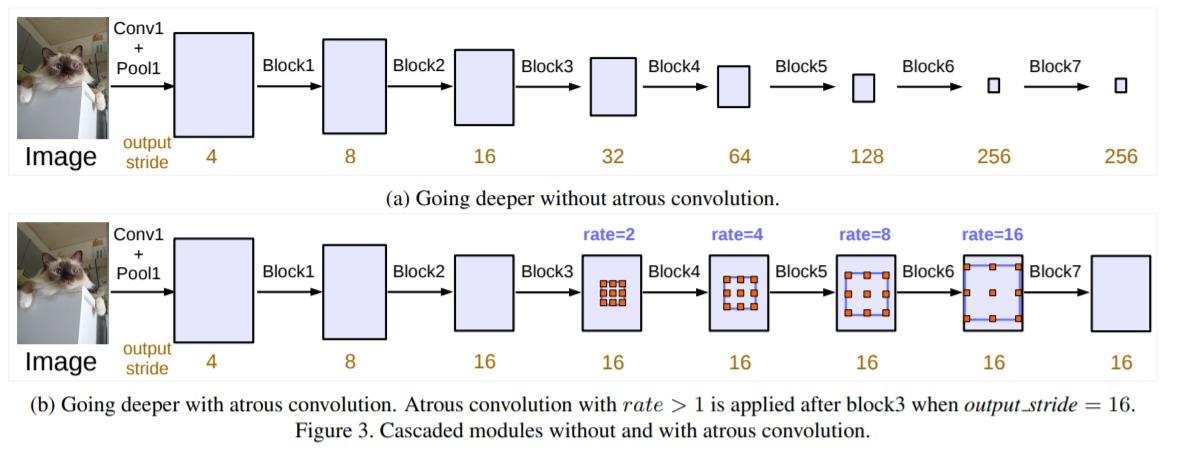
- 探索更深层的模型下,空洞卷积的效果。
- 空洞空间金字塔池化 Atrous Spatial Pyramid Pooling(ASPP)的优化。
作者将ResNet深层的模块替换为空洞卷积,获得了比较大的感受野,而且可以捕获远端的信息。其中dilation rate的设计十分重要,不当的设计会造成精度降低。
此外作者对ASPP模块做了升级。在实验中发现,dilation rate组合不当的情况下,3x3的卷积核会退化成1x1的卷积。因此作者重新调整了rate组合,从V2中的$[6, 12, 18, 24]$改进成$[1, 6, 12, 18]$;此外作者认为空洞卷积损失了一定信息,因此增加了全局平均池化来保存全局的上下文信息:

#DeepLabV3版本的ASPP
class ASPP_module(nn.ModuleList):
def __init__(self, in_channels, out_channels, dilation_list=[1, 6, 12, 18]):
super(ASPP_module, self).__init__()
self.dilation_list = dilation_list
for dia_rate in self.dilation_list:
self.append(
nn.Sequential(
nn.Conv2d(
in_channels, out_channels,
kernel_size=1 if dia_rate==1 else 3,
dilation=dia_rate, padding=0 if dia_rate==1 else dia_rate),
nn.BatchNorm2d(out_channels),
nn.ReLU()
)
)
def forward(self, x):
outputs = []
for aspp_module in self:
outputs.append(aspp_module(x))
return torch.cat(outputs, 1)
class DeepLabV3(nn.Module):
def __init__(self, num_classes):
super(DeepLabV3, self).__init__()
self.num_classes = num_classes
self.ASPP_module = ASPP_module(512,256,dilation_list=[1,6,12,18])
self.backbone = ResNet()
self.final = nn.Sequential(
nn.Conv2d(256*4+256, 256, kernel_size=1),
nn.BatchNorm2d(256),
nn.ReLU(),
nn.Conv2d(256, self.num_classes, kernel_size=1)
)
self.avg_pool = nn.Sequential(
nn.AdaptiveAvgPool2d((1)),
nn.Conv2d(512, 256, 1, bias=False),
nn.BatchNorm2d(256),
nn.ReLU(inplace=True))
def forward(self, x):
x = self.backbone(x)[-1]
x_1 = self.ASPP_module(x)
x_2 = nn.functional.interpolate(self.avg_pool(x), size=(x.size(2), x.size(3)), mode='bilinear', align_corners=True)
x = torch.cat([x_1, x_2], 1)
x = nn.functional.interpolate(input=x ,scale_factor=8,mode='bilinear', align_corners=True)
x = self.final(x)


