SegNet: 图像分割的深度卷积编码器-解码器结构.
SegNet网络是典型的编码-解码结构。SegNet编码器网络由VGG16的前13个卷积层构成,所以通常是使用VGG16的预训练权重来进行初始化。每个编码器层都有一个对应的解码器层,因此解码器层也有13层。解码器最后的输出输入到softmax分类器中,输出每个像素的类别概率。
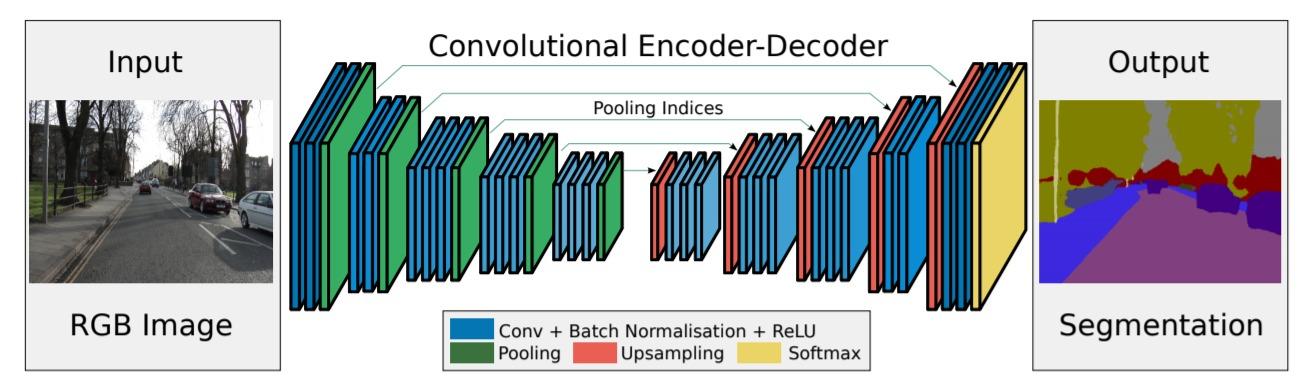
SegNet网络的上采样使用反池化 unpooling。 下采样时,存储对应的最大池化索引位置;上采样时,用存储的索引进行上采样最大池化。

SegNet的一个简易参考实现如下:
import torch
import torch.nn as nn
import torch.nn.init as init
import torch.nn.functional as F
from torchvision import models
# define Decoder
class SegNetDec(nn.Module):
def __init__(self, in_channels, out_channels, num_layers):
super().__init__()
layers = [
nn.Conv2d(in_channels, in_channels // 2, 3, padding=1),
nn.BatchNorm2d(in_channels // 2),
nn.ReLU(inplace=True),
]
layers += [
nn.Conv2d(in_channels // 2, in_channels // 2, 3, padding=1),
nn.BatchNorm2d(in_channels // 2),
nn.ReLU(inplace=True),
] * num_layers
layers += [
nn.Conv2d(in_channels // 2, out_channels, 3, padding=1),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
]
self.decode = nn.Sequential(*layers)
def forward(self, x):
return self.decode(x)
# SegNet
class SegNet(nn.Module):
def __init__(self, classes):
super().__init__()
vgg16 = models.vgg16(pretrained=True)
features = vgg16.features
self.enc1 = features[0: 4]
self.enc2 = features[5: 9]
self.enc3 = features[10: 16]
self.enc4 = features[17: 23]
self.enc5 = features[24: -1]
for m in self.modules():
if isinstance(m, nn.Conv2d):
m.requires_grad = False
self.dec5 = SegNetDec(512, 512, 1)
self.dec4 = SegNetDec(512, 256, 1)
self.dec3 = SegNetDec(256, 128, 1)
self.dec2 = SegNetDec(128, 64, 0)
self.final = nn.Sequential(*[
nn.Conv2d(64, classes, 3, padding=1),
nn.BatchNorm2d(classes),
nn.ReLU(inplace=True)
])
def forward(self, x):
x1 = self.enc1(x)
e1, m1 = F.max_pool2d(x1, kernel_size=2, stride=2, return_indices=True)
x2 = self.enc2(e1)
e2, m2 = F.max_pool2d(x2, kernel_size=2, stride=2, return_indices=True)
x3 = self.enc3(e2)
e3, m3 = F.max_pool2d(x3, kernel_size=2, stride=2, return_indices=True)
x4 = self.enc4(e3)
e4, m4 = F.max_pool2d(x4, kernel_size=2, stride=2, return_indices=True)
x5 = self.enc5(e4)
e5, m5 = F.max_pool2d(x5, kernel_size=2, stride=2, return_indices=True)
def upsample(d):
d5 = self.dec5(F.max_unpool2d(d, m5, kernel_size=2, stride=2, output_size=x5.size()))
d4 = self.dec4(F.max_unpool2d(d5, m4, kernel_size=2, stride=2, output_size=x4.size()))
d3 = self.dec3(F.max_unpool2d(d4, m3, kernel_size=2, stride=2, output_size=x3.size()))
d2 = self.dec2(F.max_unpool2d(d3, m2, kernel_size=2, stride=2, output_size=x2.size()))
d1 = F.max_unpool2d(d2, m1, kernel_size=2, stride=2, output_size=x1.size())
return d1
d = upsample(e5)
return self.final(d)
在上述代码中,将vgg16的31个层分作5个编码模块,每个编码模块的基本结构如下所示:
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)


